











Kod QR

Produkty
Skontaktuj się z nami

Telefon

E-mail

Adres
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny

Wraz z rosnącym postępem inteligentnej technologii produkcyjnej, penetracja zautomatyzowanych linii produkcyjnych w branży produkcji stali magnetycznej staje się coraz głębsza. Jednak tradycyjny tryb ładowania i rozładunku ręcznego, który ma niską wydajność, dużą jakość fluktuacji i potencjalne zagrożenia bezpieczeństwa, stopniowo wykazywał odłączenie od nowoczesnych potrzeb produkcyjnych. Innowacyjne rozwiązanie stosowania inteligentnych robotów kompozytowych Fuwei do ładowania i rozładunku stali magnetycznej ma na celu promowanie transformacji produkcji stali magnetycznej w kierunku kompleksowej automatyzacji i inteligencji poprzez poprawę wydajności produkcji, zmniejszenie kosztów pracy i zwiększenie bezpieczeństwa operacyjnego. Plan ten reprezentuje nie tylko innowacje technologii produkcji, ale także aktywnie praktykuje wizję przyszłych inteligentnych fabryk.
Punkty bólu branżowego:
1. Wysoka zależność od operacji ręcznej prowadzi do niskiej wydajności produkcji i niestabilnej jakości;
2. Istnieją zagrożenia bezpieczeństwa podczas procesu operacyjnego, takie jak wypadki, takie jak szczypanie rąk i uderzenie;
3. Słabe środowisko pracy stanowi potencjalne zagrożenie dla zdrowia operatorów;
4. Ręczne działanie jest trudne do zaspokojenia potrzeb produkcyjnych na dużą skalę.
Przegląd potrzeb i rozwiązań klientów
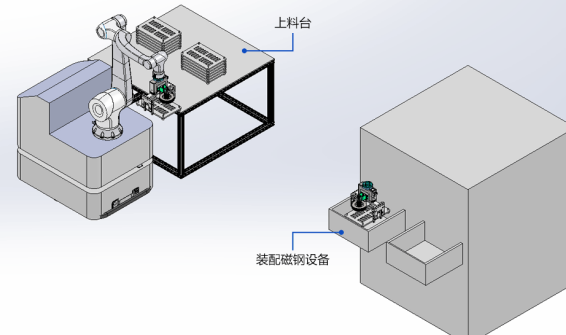
Zapotrzebowanie na klienta: Klient ma nadzieję osiągnąć automatyczne ładowanie i rozładunek stali magnetycznej przez inteligentny robot kompozytowy Fuwei, poprawiając wydajność produkcji i stabilność jakości. Szczegółowe wymagania obejmują wypełnienie ładowania i rozładunku dwóch rodzajów produktów, z czasem cyklu około 80 sekund, aby ukończyć ładowanie dwóch stosów produktów oraz posiadanie wysokich wymagań precyzyjnych.
Przegląd rozwiązania
Proponujemy następujący plan remontu, aby zaspokoić potrzeby naszych klientów:
1. Wymień kontroler silnika i serwomechanizmu, aby poprawić wydajność i stabilność robota;
2. Wyposażony w nawigację radarową, paski lekkie i głośniki w celu zwiększenia autonomicznej nawigacji, widoczności i interaktywności robota;
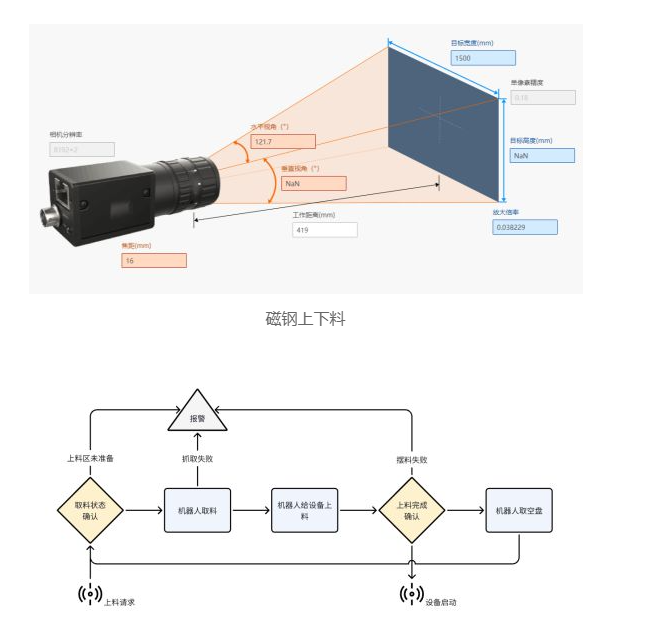
3. Dostosowane chwytaki, które integrują kamery i czujniki w celu osiągnięcia precyzyjnej identyfikacji i chwytania stali magnetycznej;
4. Zoptymalizuj konfigurację układu i sprzętu obszarów ładowania i rozładunku, aby upewnić się, że roboty mogą dokładnie i skutecznie ukończyć swoją pracę.
4 、 Szczegółowe wdrożenie planu renowacji
Złożona transformacja robota

Wybierz wysokowydajne silniki i kontrolery serwomechanizmu, aby zapewnić dokładność i stabilność ruchu robota;
Wyposażony w nawigację radarową w celu osiągnięcia autonomicznego pozycjonowania i planowania ścieżek robotów;
Zainstaluj paski światła LED i głośniki alarmowe, aby zwiększyć widoczność i interaktywność robota;
Projektuj spersonalizowane chwytaki, które integrują kamery i czujniki, aby osiągnąć precyzyjną identyfikację i chwytanie stali magnetycznej.
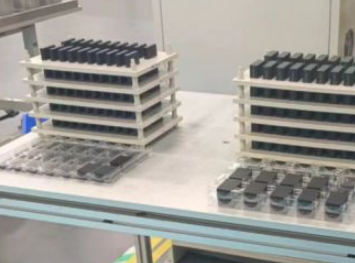
Optymalizacja obszaru ładowania
Projektowanie pozycjonowania Gniazda, aby poprowadzić stal magnetyczną w wyznaczone pozycje;
Skonfiguruj znaczniki pozycjonowania pulpitu, aby ułatwić rozpoznawanie robota i pozycjonowanie punktów chwytania.
Renowacja obszaru rozładunku
Ustaw znak pozycjonowania urządzenia, aby robot dokładnie umieścił stal magnetyczną;
Zainstaluj elektryczne drzwi panelu sterowania i przesuwane gniazda sterowania elektrycznego, aby chronić operatorów przed obrażeniami i osiągnąć zautomatyzowane wyrzucanie sprzętu.
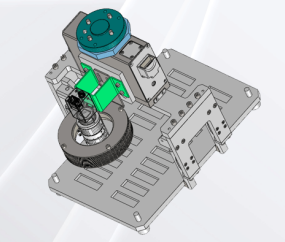
Logika wykonania i optymalizacja procesu
Logika wykonania całego rozwiązania opiera się na projektowaniu procesu zautomatyzowanych linii produkcyjnych, zapewniając ciągłość i wydajność przepływu pracy. Cały proces jest wywoływany przez żądanie ładowania, a robot wykonuje operacje pobierania materiałów w zależności od tego, czy obszar ładowania jest gotowy. Podczas procesu zbierania i umieszczania materiałów dokładne rozpoznawanie i kontrola siły osiąga się za pomocą kamer i czujników zintegrowanych z chwytakiem. Po pomyślnym umieszczeniu magnesu na sprzęcie robot potwierdzi zakończenie ładowania i przejdzie do następnego cyklu.
Korzystając z inteligentnego robota kompozytowego Fuwei do ładowania i rozładunku stali magnetycznej, możemy skutecznie rozwiązać problemy tradycyjnych metod obciążenia i rozładunku ręcznego, poprawić wydajność produkcji, zmniejszyć koszty pracy i zapewnić bezpieczeństwo operacyjne. Jednocześnie rozwiązanie to ma również wysoką skalowalność i elastyczność, które mogą dostosować się do przedsiębiorstw produkcyjnych stali magnetycznej o różnych skalach i potrzeb produkcyjnych.
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny
