










Kod QR

Produkty
Skontaktuj się z nami

Telefon

E-mail

Adres
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny

W nowoczesnej branży produkcyjnej, która realizuje wydajność, precyzję i automatyzację, zastosowanie technologii obróbki CNC staje się coraz bardziej rozpowszechnione. Jednak proces ładowania i rozładunku narzędzi maszynowych CNC często staje się wąskim gardłem ograniczającym wydajność produkcji. Aby przezwyciężyć to ograniczenie, Fuweii Intelligent uruchomił kompozytowe rozwiązanie automatycznego ładowania i rozładowywania robota CNC, przekształcając proces produkcji oraz poprawę wydajności i elastyczności produkcji.
Przegląd projektu
Ten projekt ma na celu osiągnięcie automatycznego ładowania i rozładunku surowców podczas obróbki CNC, a także niezbędne procesy kontroli i czyszczenia. Wprowadzając kompozytowy system AGV (zautomatyzowany pojazd z przewodnikiem), w połączeniu z kamerami skanującymi i pozycjonującymi kamerami wizji, można osiągnąć precyzyjne i wydajne obsługę materiałów i zarządzanie procesami.
Skład systemu
Złożony system ramion AGV: zawiera kluczowe elementy, takie jak ciało AGV, ramię robotyczne, kamera skanująca, kamera wizji pozycjonującej itp.
System sterowania: Odpowiedzialny za odbieranie sygnałów zadań z systemu urządzeń ②, kontrolowanie systemu robotycznego AGV w celu ukończenia działań, takich jak chwytanie materiałów, obsługa i umieszczanie.
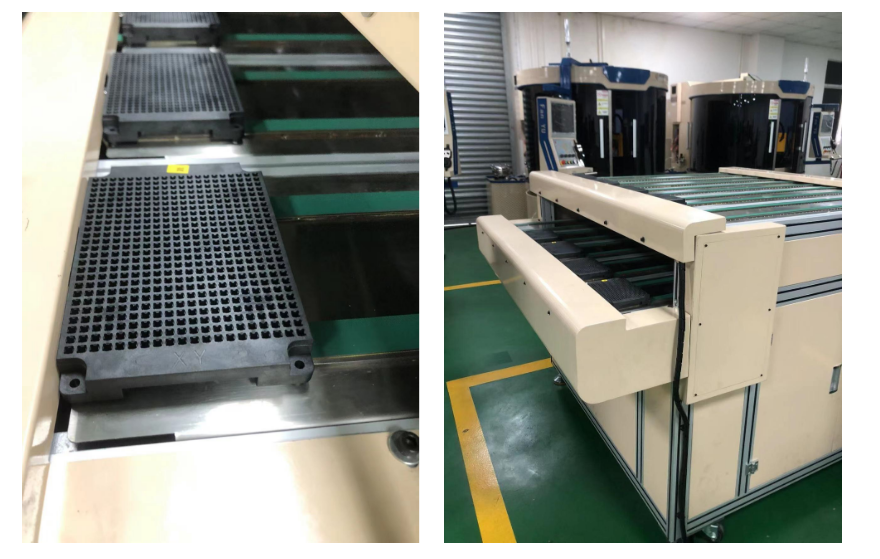
System skanowania: skanując kod QR na tacy materiałowej za pomocą kamery skanującej, informacje materialne można wprowadzić i śledzić.
System pozycjonowania: Wykorzystanie pozycjonowania kamer wizji w celu osiągnięcia precyzyjnego pozycjonowania i nawigacji systemów ramion robotycznych AGV.
Przepływ pracy
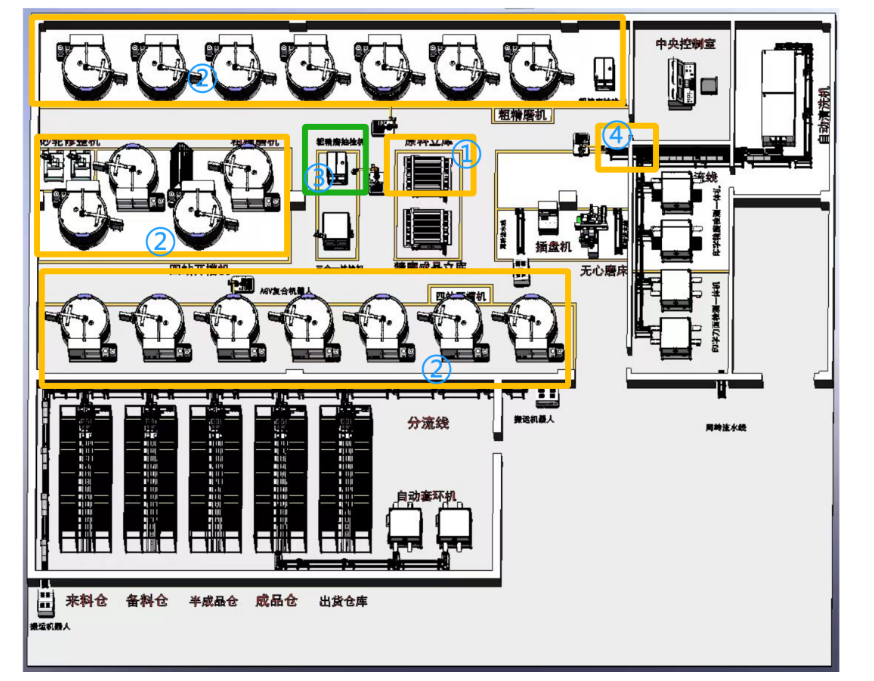
Chwytanie surowców: kompozytowy system ramion AGV trafia do pierwszej warstwy przechowywania surowca, aby chwycić materiały do przetworzenia zgodnie z instrukcjami systemu sterowania.
Procedura przetwarzania: Dostarcz przechwycone materiały do maszyny w obszarze ②, umieść je zgodnie z wewnętrzną pozycją umieszczania maszyny i poczekaj na przetwarzanie.
Proces testowania (opcjonalnie): Jeśli system wyda żądanie testowe, wyślij dysk pleśni z pozycji testowej maszyny w obszarze ② do obszaru umieszczania urządzeń testujących w obszarze ③ do testowania. Po zakończeniu kontroli wyślij dysk pleśni z powrotem do maszyny w obszarze ②.
Proces czyszczenia: Umieść materiały przetwarzane przez sprzęt w obszarze ② Na linii przenośnej maszyny czyszczącej w obszarze ④, a prace czyszczące materiały zostaną automatycznie zakończone przez linię przenośnika.
Wdrożenie techniczne
Złożony system ramion AGV AGV: Przyjęcie zaawansowanej technologii AGV i technologii ramion robotycznych w celu osiągnięcia wydajnego i precyzyjnego obsługi materiałów.
System skanowania: Wykorzystanie wysokowydajnych kamer skanowania w celu zapewnienia dokładnego wejścia i śledzenia informacji o materiale.
System pozycjonowania: Wykorzystanie zaawansowanej technologii pozycjonowania wizualnego w celu osiągnięcia precyzyjnego pozycjonowania i nawigacji systemów ramion AGV.
System sterowania: Przyjęcie niezawodnego systemu sterowania w celu zapewnienia stabilnej pracy i wydajnej współpracy całego systemu.
Zalety systemowe
Wysoki stopień automatyzacji: realizacja automatycznego ładowania i rozładunku, wykrywania i czyszczenia surowców w procesie obróbki CNC, poprawa wydajności produkcji.
Wysoka precyzja: przy użyciu kamer skanujących i pozycjonowania kamer wizualnych można osiągnąć dokładne wejście i precyzyjne pozycjonowanie informacji o materiale.
Silna elastyczność: przepływ pracy można elastycznie dostosować zgodnie z rzeczywistymi potrzebami w celu spełnienia różnych wymagań produkcyjnych.
Silna identyfikowalność: wykorzystując system skanowania do śledzenia informacji o materiałach i śledzenia przez cały proces, poziom zarządzania jakością produktu można poprawić.
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny
