











Kod QR

Produkty
Skontaktuj się z nami

Telefon

E-mail

Adres
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny

Tło projektu:
Wraz z szybkim rozwojem automatyzacji przemysłowej coraz więcej przedsiębiorstw stara się ulepszyć swoje linie produkcyjne poprzez wprowadzenie inteligentnej technologii robotów. Wśród nich, w przypadku procesu zagranicznego, Fuwei Intelligent wykorzystuje 2D Vision, aby poprowadzić robota do wykonywania ruchu okrężnego, co może nie tylko poprawić wydajność produkcji, ale także zmniejszyć koszty pracy i poprawić jakość produktu. To rozwiązanie ma na celu stworzenie wysoce zautomatyzowanej inteligentnej linii produkcyjnej procesu.

Trudność projektu:
Różne obrabiane mogą mieć różnice w kształcie, teksturze, warunkach oświetlenia itp., Które wymagają wysokiej dokładności pozycjonowania wizualnego;
Roboty muszą wykonywać trajektorie ruchu okrągłego w celu wykonania zadań rozebranych, co wymaga, aby system kontroli robota był w stanie obliczyć i dostosować trajektorię ruchu w czasie rzeczywistym;
Jakość poniżania bezpośrednio wpływa na jakość produktu i wydajność linii produkcyjnej. Jak osiągnąć wydajny i stabilny proces pokładowy, unikanie uszkodzenia obrabiania lub pozostawienie resztkowych burr, jest kluczową kwestią, którą należy rozwiązać w projekcie.
Rozwiązanie:
1. Uzupełnij związek transformacji między położeniem produktu w polu widzenia kamery a pozycją produktu w układzie współrzędnych robota poprzez „kalibrację oka ręcznego”;
2. Korzystając z wizualnych wskazówek lub punktów dydaktycznych robota, kamera może przechwytywać obrazy na różnych powierzchniach obiektu;
3. Korzystanie z algorytmów korekcji zniekształceń obrazu w celu osiągnięcia zmian obrazu spowodowanych strzelaniem z różnych punktów;
4. 2D rozpoznawanie kamery pozycji otworów produktów;
5. Wygeneruj cztery punkty współrzędnych na podstawie pozycji otworu;
6. Robot otrzymuje cztery punkty współrzędnych;
7 Robot łączy cztery punkty sekwencji przez polecenie „ruchu okrągłego”, aby zakończyć krążące okrągłe otwór;

Wartości podstawowe:
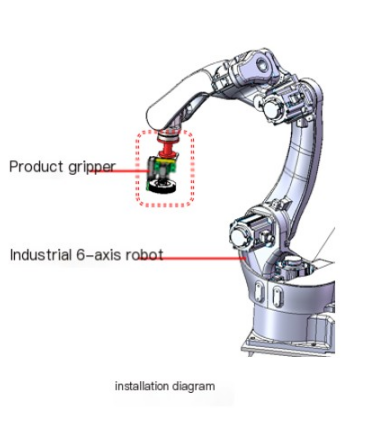
To rozwiązanie integruje system wizji 2D, bardzo precyzyjne roboty, rozbudowywanie narzędzi i inteligentne systemy sterowania w celu osiągnięcia precyzyjnego rozpoznawania, pozycjonowania i automatycznego ponownego rozebrania robót. Robot automatycznie planuje i wykonuje okrągłą trajektorię ruchu w oparciu o informacje o pozycji i postawie przedmiotu obrabianego dostarczonego przez system wizji 2D w celu wykonania zadania zagranicznego.
Uaktualnienie automatyzacji procesu rozebranego zostało osiągnięte poprzez zintegrowanie systemu wizji 2D, systemu robotów i inteligentnego systemu sterowania. To rozwiązanie nie tylko poprawia wydajność produkcji i zmniejsza koszty pracy, ale także zwiększa bezpieczeństwo jakości produktu i linii produkcyjnej.
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny
