











Kod QR

Produkty
Skontaktuj się z nami

Telefon

E-mail

Adres
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny

1 、 Przegląd projektu
Plan ten ma na celu dostosowanie systemu platformy praktyki edukacji robotów, aby zaspokoić potrzeby dydaktyczne uniwersyteckiego laboratorium w wizji maszynowej i kontroli siły. System zostanie opracowany wokół wspólnego robota AUBO-I5, kamery przemysłowej Hikvision, kamery 3D i czujnika siły sześciu osi w celu osiągnięcia funkcji, takich jak kontrola robota, kontrola wizualna i montaż kontroli siły oraz zapewnić otwarte oprogramowanie komputerowe do późniejszej ekspansji funkcjonalnej.

2 、 Kompozycja sprzętowa systemowa
Robot: Przyjmowanie wspólnego robota AUBO-I5 ma charakterystykę wysokiej precyzji i bezpieczeństwa i jest odpowiedni do scenariuszy nauczania.
Kamera: w tym kamera przemysłowa Hikvision i kamera 3D, używana do uzyskania informacji o obrazie o norty, obsługi tradycyjnego przetwarzania obrazu i wykrywania obrazu głębokiego uczenia się.
Sześci wymiarowy czujnik siły: Kunwei (KWR75) lub inne marki są wybierane do monitorowania informacji o interakcji siły między efektorem końcowym robota a przedmiotem obrabianym.
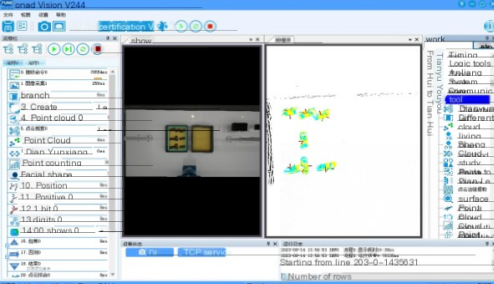
3 、 Projektowanie oprogramowania górnego komputerowego
Podstawowe funkcje:
Kontrola robota: Wdrażaj funkcje, takie jak połączenie, odłączenie, połączenie lub kontrola postawy robotów.
Kontrola kamery: Wdrożenie funkcji, takich jak połączenie kamery, odłączenie i akwizycja obrazu.
Wyświetlanie statusu: Wyświetlanie złącza i pozycji robota w czasie rzeczywistym, parametry statusu czujnika siły sześciu osi oraz obrazy przechwycone przez kamerę.
Ekskluzywne funkcje:
Zespół otworu wału: poprzez działanie górnego komputera, w połączeniu z technologią kontroli wizualnej i sterowania siłą, osiąga się automatyczną funkcję montażu otworu wału.
Projektowanie interfejsu: Górny interfejs komputerowy powinien być zwięzły, jasny i łatwy w obsłudze. Interfejs powinien zawierać podstawowe przyciski funkcji i obszar wyświetlania statusu, a także zapewnić dostęp do funkcji zespołu otworu wału.
4 、 Implementacja funkcji
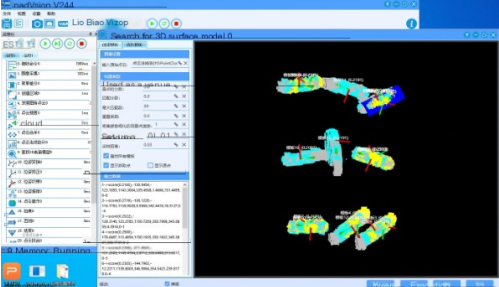
Wizja maszyny:
Tradycyjne wykrywanie obrazu: za pomocą dopasowania szablonu, dopasowania koła, dopasowania krawędzi i innych metod zlokalizowania i rozpoznawania obrabiów, obsługujących rozpoznawanie kodów kreskowych, kodów QR, numerów znaków, a także obliczania obszaru skalowania szarości i ilości płyty.
Detekcja obrazu głębokiego uczenia się: automatyczne rozpoznawanie i lokalizacja obrabiów poprzez algorytmy głębokiego uczenia się. Chociaż głębokie uczenie się nadal wymaga ręcznej adnotacji obrazów, będziemy dążyć do poprawy wydajności szkolenia i dokładności rozpoznawania, stopniowo zmniejszając obciążenie adnotacjami.
Zespół kontroli mocy:
Łącząc dane z sześcio wymiarowych czujników siły, osiągnij kontrolę interakcji siły między efektorem końcowym robota a przedmiotem obrabianym oraz pełne precyzyjne montaż otworu wału.
5 、 Ryzyko projektowe i miary reakcji
Ryzyko współpracy z czujnikami siły sześciu osi: Z powodu braku współpracy z czujnikami siły sześciu osi mogą występować pewne trudności techniczne i niepewności. Zorganizujemy profesjonalny zespół techniczny, aby rozwiązać problem i zapewnimy sprawną integrację i stabilne działanie czujników.
Ryzyko wykrywania obrazu głębokiego uczenia się: Detekcja obrazu głębokiego uczenia się wymaga pewnego poziomu dokładności i wydajności rozpoznawania, jednocześnie spełniając wymagania szkolenia jednego kliknięcia. Będziemy nadal optymalizować algorytmy głębokiego uczenia się w celu poprawy dokładności rozpoznawania i wydajności, jednocześnie badając sposoby wdrożenia szkolenia jednego kliknięcia.
6 、 Post Rozszerzenie i przełączanie scen
Górne oprogramowanie komputerowe przyjmuje projekt open source, który ułatwia rozszerzenie funkcjonalne i przełączanie scen w razie potrzeby w późniejszym nauczaniu. Na przykład scena montażu otworów wału można przełączać na zadania takie jak siatka drobnych biegów lub rozpoznawanie i chwytanie innych obrabianych. Modyfikując i debugując programy typu open source, łatwo jest osiągnąć funkcje pracy robota i wizualne wykrywanie w różnych scenariuszach.
Plan ten integruje zasoby sprzętowe, takie jak roboty, kamery i czujniki siły sześciu osi, w połączeniu z projektowaniem oprogramowania górnego komputerowego open source, aby zapewnić bogate funkcje i łatwo rozszerzalne środowisko nauczania dla platformy praktyki edukacji robotów. Dzięki zastosowaniu praktycznych platform studenci mogą lepiej zrozumieć zasady i zastosowania wizji maszynowej i technologii kontroli siły oraz poprawić ich praktyczne i innowacyjne umiejętności.
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny
