


")








Kod QR

Produkty
Skontaktuj się z nami

Telefon

E-mail

Adres
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny

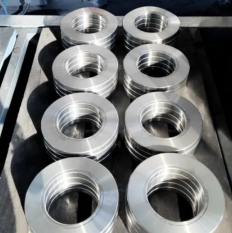
Wraz z szybkim rozwojem przemysłu produkcyjnego popyt na automatyzację i inteligentną produkcję rośnie z dnia na dzień. Zwłaszcza w scenariuszach produkcyjnych o wysokiej precyzyjnej i wysokiej wydajności tradycyjne metody żywienia nie są już wystarczające do zaspokojenia potrzeb produkcyjnych. Pojawienie się technologii 3D Vision stanowi nowe rozwiązanie do precyzyjnego karmienia złożonych obrabiarek, takich jak pierścienie bezwładnościowe.
Podstawową zasadą technologii wizji 3D jest przetwarzanie i analiza trójwymiarowych informacji przestrzennych obiektów za pośrednictwem komputerów i osiągnięcie operacji, takich jak rozpoznawanie obiektów, wykrywanie, śledzenie i pomiar. W zastosowaniu precyzyjnego karmienia pierścieni bezwładnościowych technologia wizji 3D przechwytuje trójwymiarowe informacje przestrzenne pierścienia bezwładnościowego, zapewniając robotowi dokładną pozycję i postawę chwytania, osiągając w ten sposób precyzyjne żywienie pierścienia inercyjnego.
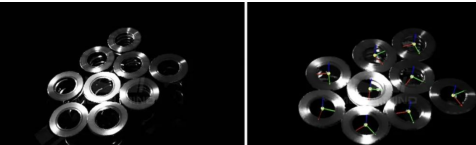
Pod względem algorytmów obrazowania technologia wizji 3D przyjmuje zaawansowane algorytmy do radzenia sobie ze złożonymi sytuacjami, takimi jak odbicie powierzchni i pokrycie folii olejowych pierścieni bezwładnościowych. Optymalizując algorytmy, system jest w stanie wygenerować jasne i dokładne dane w chmurze punktowej, zapewniając solidne podstawy do późniejszego rozpoznawania i przechwytywania.
Jeśli chodzi o wybór kamery, systemy wizji 3D muszą wybierać kamery o wysokiej rozdzielczości, duże pole widzenia i dużą głębokość pola. Ten rodzaj aparatu może przechwycić pełną informację o kształcie i rozmiaru pierścienia bezwładnościowego, zapewniając, że robot może dokładnie znaleźć pozycję docelową podczas procesu chwytania. Jednocześnie charakterystyka dużej głębokości pola umożliwia aparatowi utrzymanie wyraźnych efektów obrazowania na różnych odległościach, co dodatkowo poprawia dokładność karmienia.
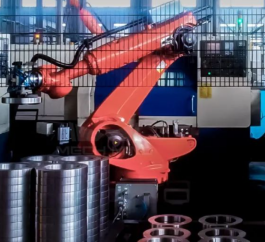
Oprócz algorytmów obrazowania i wyboru kamery technologia 3D Vision musi być również ściśle zintegrowana z systemami sterowania robotami. Przekazując trójwymiarowe informacje przestrzenne w czasie rzeczywistym pierścienia bezwładności do systemu sterowania robotem, robot może dokładnie zlokalizować pozycję pierścienia bezwładności i wykonywać chwytanie. Ta wymiana informacji w czasie rzeczywistym umożliwia robotom szybkie dostosowanie ich strategii chwytania w obliczu bezwładności różnorodnych specyfikacji, osiągając elastyczną produkcję.
Technologia 3D Vision odegrała ważną rolę w precyzyjnym procesie żywieniowym pierścieni bezwładnościowych. Optymalizując algorytmy obrazowania, wybierając odpowiednie kamery i ściśle współpracując z systemami kontroli robotów, technologia ta osiąga wydajne i precyzyjne chwytanie pierścieni bezwładnościowych, poprawia wydajność produkcji i zmniejsza koszty produkcji.
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny
