











Kod QR

Produkty
Skontaktuj się z nami

Telefon

E-mail

Adres
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny

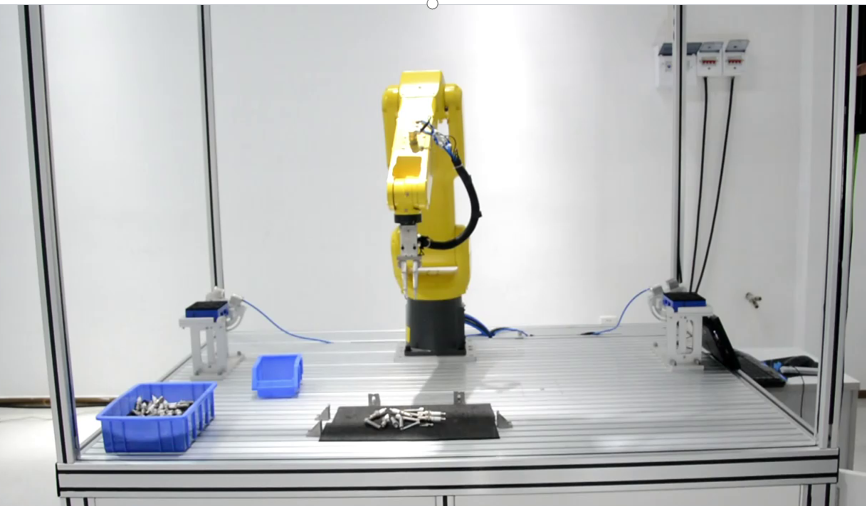
Wraz z ciągłym doskonaleniem automatyzacji produkcyjnej duże przedsiębiorstwo części samochodowych zaproponowało potrzebę użycia robotów kompozytowych w celu ukończenia sortowania śrub w celu poprawy wydajności produkcji i zmniejszenia kosztów pracy. Fuwei Intelligent wykorzystuje roboty kompozytowe, w połączeniu z 3D kamer przemysłowych i kontrolerów o wysokiej wydajności, aby osiągnąć automatyczne chwytanie śrub, poprawiając w ten sposób ogólną wydajność operacyjną linii produkcyjnej.
Trudności w projekcie
1. Wymagania dotyczące wysokiej precyzyjnej: śruby to małe komponenty, które wymagają robotów dokładnej identyfikacji i stabilnego chwytania, unikając uszkodzenia produktu lub przestoju linii produkcyjnej.
2. Roboty muszą dostosować się do czynników dynamicznych, takich jak różne pozycje półki i zmiany punktów chwytania.
3. Zapewniając dokładność składników, konieczne jest zoptymalizowanie procesu działania robota i poprawę ogólnej wydajności operacyjnej.

Rozwiązanie
Wykorzystując aparaty przemysłowe 3D i kontrolery o wysokiej wydajności, roboty mogą dokładnie lokalizować komponenty śrubowe i dostosowywać strategie chwytania w czasie rzeczywistym poprzez rozpoznawanie wizualne, zapewniając stabilność i dokładność.
Inteligentny zintegrowany kontroler Fuwei zbiera sygnały warsztatowe, aby osiągnąć bezproblemową integrację między robotami a linią produkcyjną. Jednoczesna kontrola, elastyczna regulacja trajektorii w zależności od zmian w stojaku materiałowym i punktami chwytania, dostosowywanie do środowisk dynamicznych.
Zoptymalizuj proces pracy domowej, skróć czas oczekiwania i popraw skuteczność chwytania. Ustaw rozsądny czas cyklu pracy domowej i dostosuj ilość chwytania i montażu zgodnie z zapotrzebowaniem na zaspokojenie rzeczywistych potrzeb linii produkcyjnej.
Proces działania:
Po otrzymaniu żądania chwytania materiału robot kompozytowy zaczyna przenosić się do wyznaczonej pozycji produktu. Następnie robot przeprowadzi pozycjonowanie wizualne, aby zapewnić dokładne rozpoznawanie i chwytanie produktu. Podczas procesu pozycjonowania, jeśli system wykryje, że liczba produktów jest mniejsza niż wartość ustalona, uruchomi alarm i próbuje zmienić położenie. Jeśli pozycjonowanie się powiedzie, robot będzie nadal wykonywać operacje chwytania; Jeśli pozycjonowanie się nie powiedzie, przejdzie do lokalizacji następnego produktu i spróbuje ponownie. Po udanym chwytaniu robot przeniesie produkt do obszaru rozładunku, aby zakończyć operację rozładunku. Przez cały proces pozycjonowanie wizualne i chwytanie są kluczowymi krokami, zapewniając, że robot może skutecznie i dokładnie wykonać zadania ładowania i rozładowywania.
Zalety techniczne:
Może dostosować się do drastycznych zmian oświetlenia środowiska i zastępować pracę fizyczną;
Inteligentne algorytm unikania przeszkód w ramieniu robotycznego i planowania trajektorii oparty na głębokim uczeniu się wykrywania i lokalizacji obiektów;
Może dostosować się do scenariuszy, w których jednocześnie produkowane jest wiele obrabiów.
Wartości podstawowe:
Zmniejsz koszty i zwiększyć wydajność, popraw stabilność, szybko wdrożyć produkcję dzięki prostej eksploatacji i szybko dostosuj się do nowych produktów.
Plan ten znacznie poprawi wydajność operacyjną linii produkcyjnej. Tymczasem dzięki precyzyjnej technologii pozycjonowania i chwytania ryzyka uszkodzenia produktu i przestoju linii produkcyjnej można zmniejszyć, poprawiając jakość produktu i stabilność produkcji. Ponadto możliwość adaptacji do środowisk dynamicznych i wydajnej kontroli tempa dodatkowo zwiększy elastyczność i szybkość reakcji linii produkcyjnej, spełniając stale zmieniające się potrzeby produkcyjne GAC Toyota.
Nr 22, Hongyuan Road, Guangzhou, Prowincja Guangdong, Chiny
